背景(Background)
最近几年,为了提高自动驾驶的安全性能,研究者开展了大量优先吸引驾驶员视觉注意力的视觉特性认知实验,以及显著性对象检测研究。本研究引入了孪生认知学研究视角,通过构建一个隐式反馈的虚拟现实驾驶系统,较为深入地探索分析了人眼视觉在空间环境中对不同场景变化的响应特征。
创新点(Highlights)
- 虚拟现实驾驶系统。
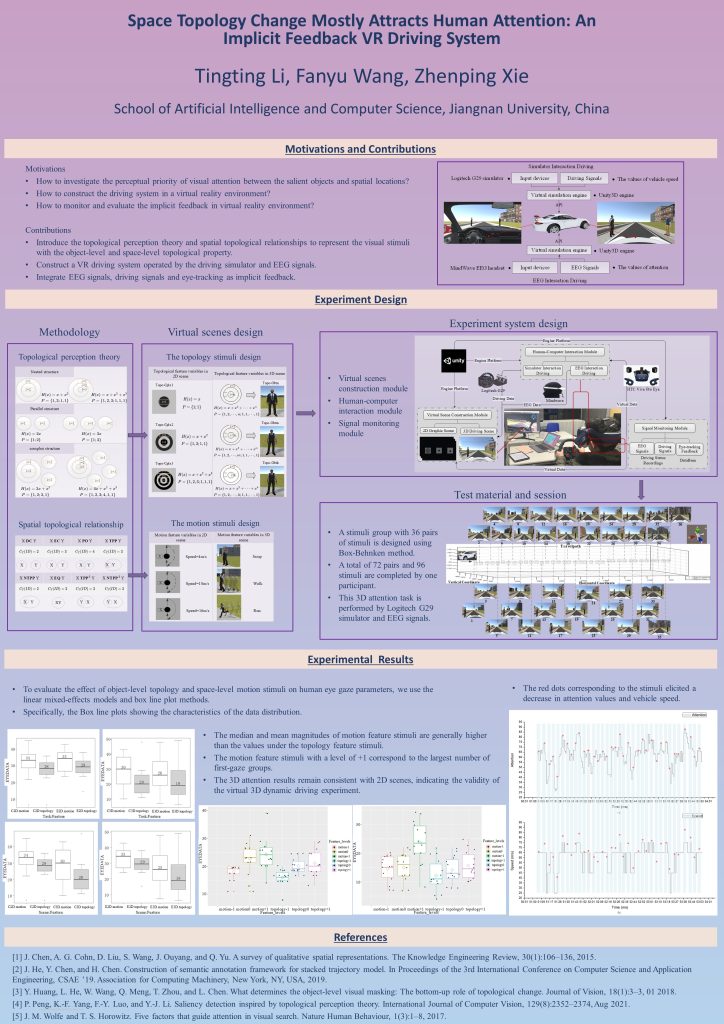
基于对象拓扑特征和基于空间运动特征的驾驶注意认知虚拟实验系统框架主要由虚拟现实场景子系统、人机交互子系统和信 号监测子系统等组成。信号监测子系统包含脑电信号、驾驶行为信号、眼动注视信号等反馈数据。
- 驾驶行为认知特性
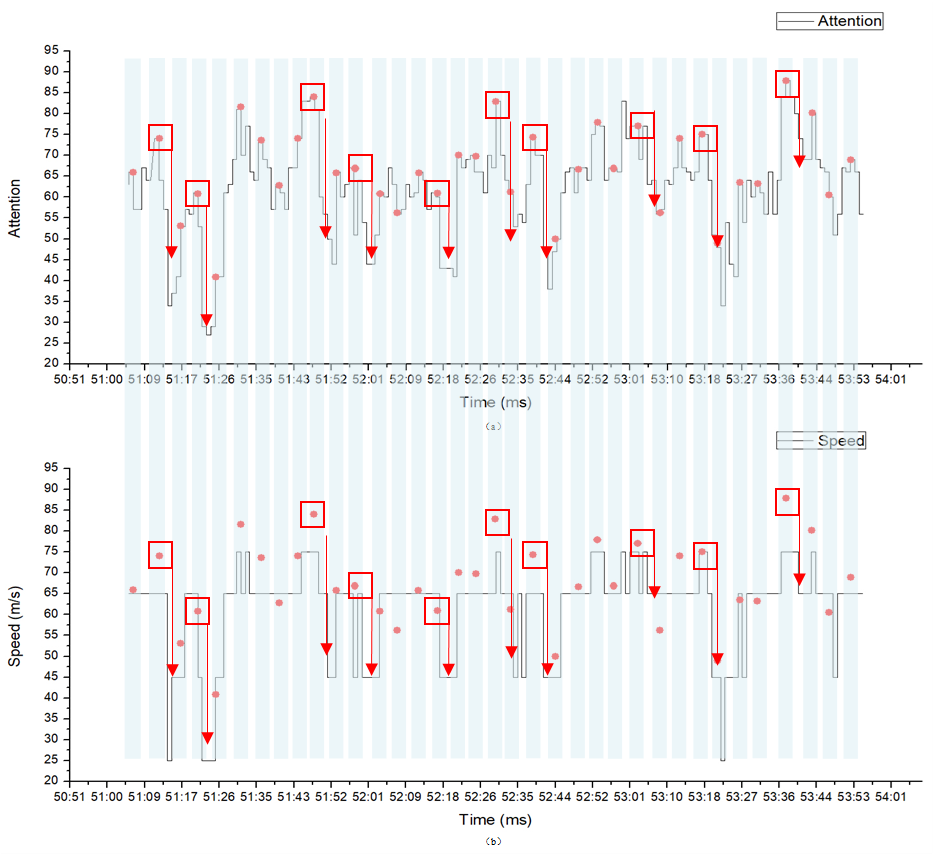
环境空间中物体的运动变化对于人眼视觉的刺激响应程度要远高于物体本身形状或色彩的变化。
方法(Methodology)
基于目标整体拓扑特征和空间运动特征识别的VR驾驶实验系统,主要包括虚拟场景构建模块(左)、人机交互模块(中)和信号监测模块(右)三个子系统。注意力认知实验分别在虚拟三维驾驶场景和虚拟二维图形场景中执行,完成人与外部环境之间的视觉注意力交互任务,统计脑电、驾驶行为、眼动注视点等隐式反馈数据,最终通过分析眼动追踪数据反映出被试的注意力行为。

实验(Experiments)
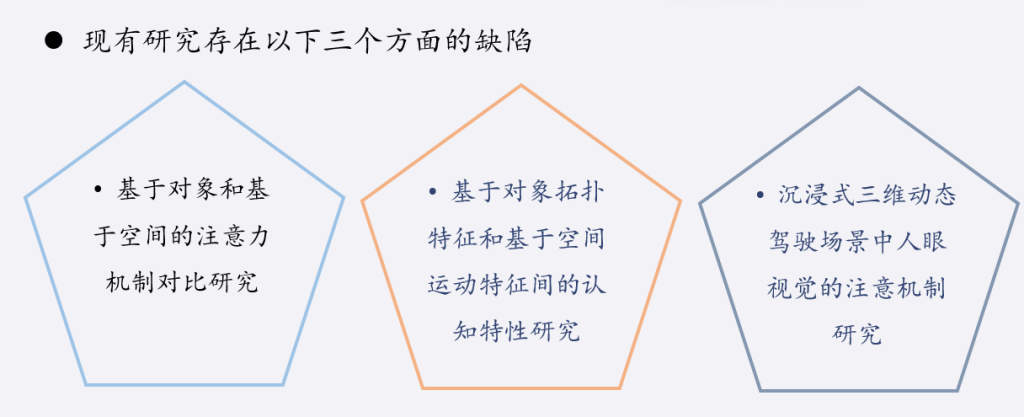
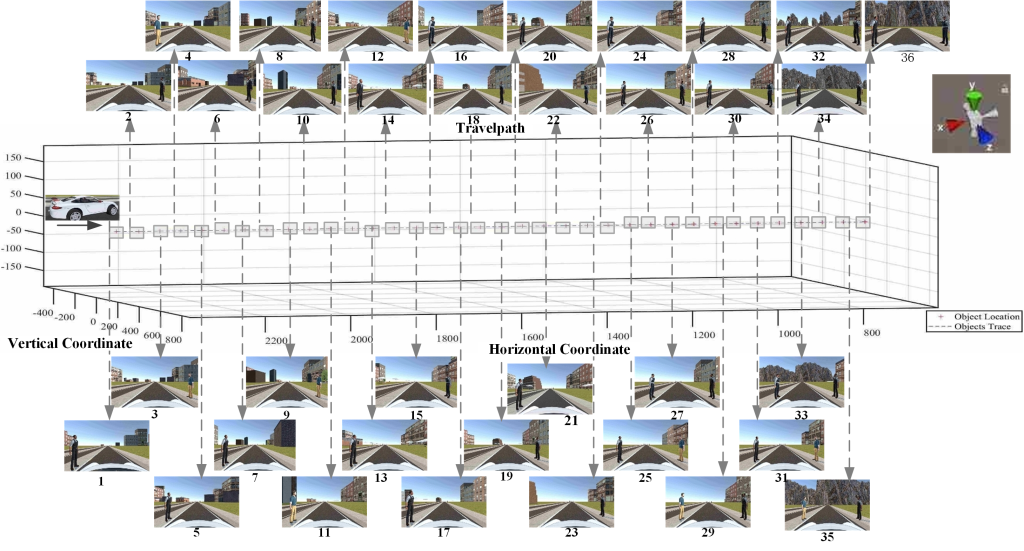
- 实验主要分为两类:(1)2D图形实验场景,简单的几何图形变化;(2)3D驾驶实验场景,模拟真实的驾驶环境,包括气候变化、过往的行人等。
2. 探讨物体级拓扑结构和空间级运动刺激对视觉注意行为的影响,实验进行了四个比较研究:(1)2D常规注意任务(C2D);(2)利用脑电信号执行的2D脑电注意任务(E2D);(3)3D常规注意任务(C3D),利用Logitech G29执行;(4)3D脑电注意任务(E3D),利用脑电信号执行。
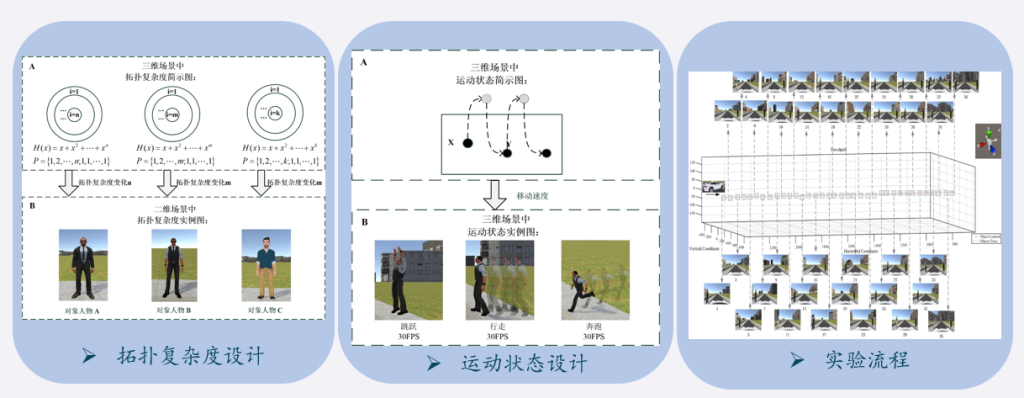
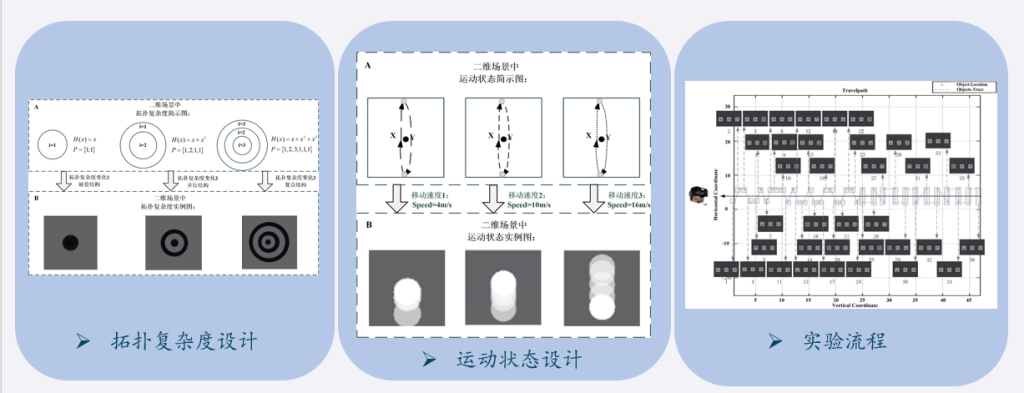
3. 刺激呈现情况非为三种:(1)仅有物体级拓扑变化;(2)仅有空间级拓扑变化;(3)物体级和空间级拓扑同时变化。
4. 在所有实验中,我们使用 Tobii 眼动追踪技术与 HTC Vive Pro Eye 头戴式显示器集成来构建眼动追踪数据集,该数据集表示为 EYEDATA,并通过线性混合效应模型和箱线图方法进行评估。

结论(Conclusion)
(1)构建了虚拟驾驶系统,包含虚拟现实系统、仿真驾驶系统、脑电控制系统等,并采用先进的脑电监测技术和眼动追踪技术对实验数据进行了采集与分析。
(2)在基于空间的运动刺激(空间层拓扑特征)、基于对象的拓扑刺激中(对象层拓扑特征)和非拓扑特征的变化中,空间级的运动变化对于人眼视觉的刺激响应程度要远高于物体本身形状或色彩的变化,即最吸引人眼视觉的注意。
(3)这为开发自动驾驶系统中运动物体感知和驾驶行为预测的计算模型提供了理论依据。
相关链接(Links)
视频链接:
论文链接:
Li T, Wang F, Xie Z. Space Topology Change Mostly Attracts Human Attention: An Implicit Feedback VR Driving System[C]//2023 IEEE Conference on Virtual Reality and 3D User Interfaces Abstracts and Workshops (VRW). IEEE, 2023: 853-854.