作者:Hu Wang,Mao Ye,Xiatian Zhu,Shuai Li,Ce Zhu and Xue Li
论文来源:International Joint Conference on Artificial Intelligence
发表日期:2022
背景
传统的HDR重建方法存没有存在着深入考虑HDR成像机制;忽视了对生成图像的降噪和对曝光不良区域的细节恢复不充分的局限性。为了克服传统方法的局限性,作者提出将HDR成像知识集成到UNet架构的新方法,称为知识启发UNet(KUNet)。
HDR成像
LDR成像:

其中其中t为曝光时间,g为传感器增益,I0为恒定偏置电流。ɸ表示场景亮度,n表示传感器噪声。
假设有一台相机可以无限捕获场景信息,则LDR图像的饱和像素值可以表示为

Ioverexposed表示理想相机捕获的像素值,Ioverflow表示理想相机和实际相机之间的溢出值。
LDR成像过程最终可以统一为:

HDR成像:

ɸ即为HDR图像。
网络架构
整体架构
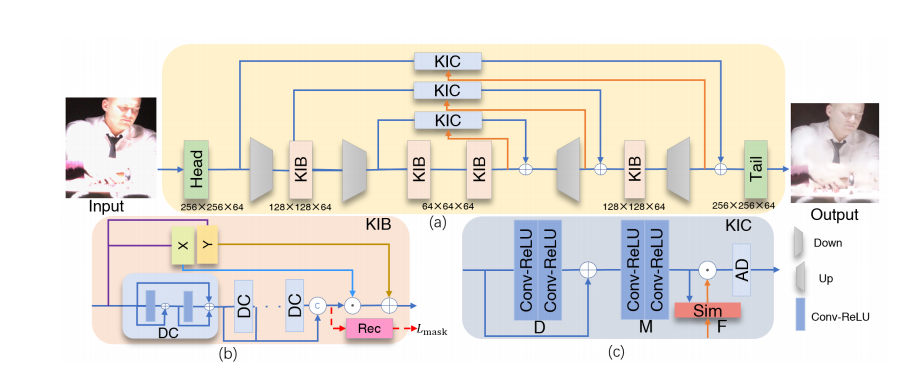
网络整体采用UNet架构,由知识启发块(KIB)和知识启发连接(KIC)构成。
Knowledge-Inspired Block(KIB)
作者利用KIB对HDR成像进行建模,因此HDR成像在特征空间的成像公式如下:

HF即为重建的HDR图像特征,其中X用来将恢复的HDR细节映射到HDR域,R用来进行HDR细节重建,Y用来对图像进行降噪。
KIB结构:
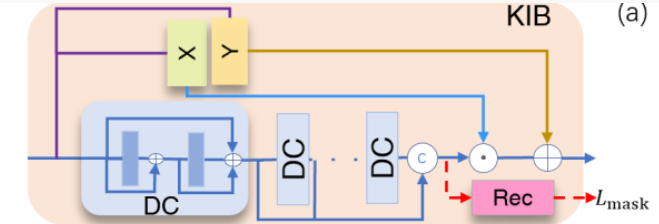
其中R是由k个密集连接块(DC)构成:

为了在训练过程中,使模型更加关注图像的过曝光区域细节的重建,在每个KIB块中引入了掩膜损失:
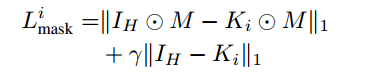
其中Ki表示第i个KIB块重建HDR细节,IH表示对应的真实HDR图像,M为过曝光区域的掩膜:

最后,X和Y用2个1*1卷积构成:

Konwledge-Inspired Jump Connection
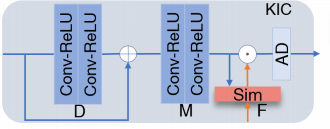
由于LDR图像具有噪声以及LDR图像和HDR图像之间存在动态范围的差距,作者设置了新的跳跃结构KIC,来弥补LDR和HDR之间的差距。
D用于处理过曝光特征与原始特征之间的差距,M用于LDR域到HDR域映射。此外,为了抑制无用信息,减少视觉重影,对上述网络处理的特征进行了进一步的过滤,最终过滤后的特征:

其中过滤器Sim为:

Loss Function

其中Lmain =∥IH−IH∥1,Lmask =∑i=1Limask(i=1~4)
实验
Dataset
作者采用了NITRE 2021 HDR挑战赛提供的数据集,作为实验采用的数据集
评估指标
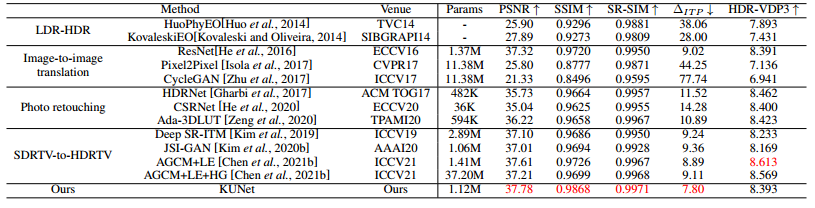
作者采用了PSNR,PSNR-µ,SSIM、SR-SSIM,HDRVDP3指标对实验结果进行评估。
Result
消融实验
作者为了验证所提出的模块对最终生成图像性能的提升是有贡献的,作者做了一系列的消融实验:
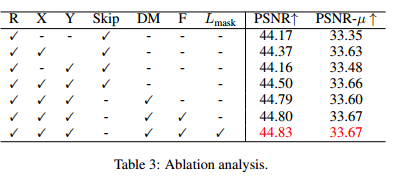
通过消融实验,作者提出的模块对于生成的HDR性能提升是由作用的。
总结
作者分析了HDR的成像过程,将HDR成像知识融合到网络中,即KIB模块对HDR成像进行建模。此外,对UNet跳跃连接结构对HDR图像恢复的不兼容问题进行了初步改进,并提出了KIC分支,将其用于辅助HDR图像恢复,并取得了很好的效果。