作者:Zheng Yingran, Luo Chao ,Shao Rui
发表期刊:IEEE Transactions on Intelligent Transportation Systems
发表日期:2025年
一、背景
1、城市交通拥堵是重大挑战,精准预测是智能交通系统核心。
2、现有模型局限性:
1)时空建模的分离:现有方法在时空建模上存在分离,未能有效整合时空信息
2)静态邻接矩阵的局限性:传统图卷积模型使用静态邻接矩阵来捕捉空间依赖性,无法反映节点间动态相关性。
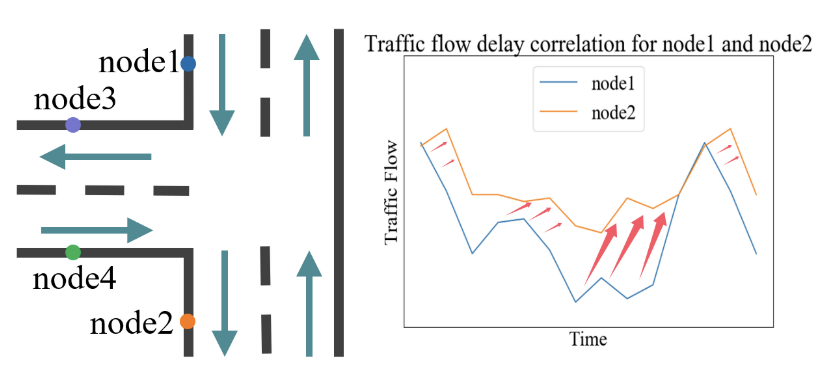
3)时空依赖性捕捉不足:大多数方法假设交通流量信息的传播是瞬时的,忽略了节点间信息传播的延迟(如节点1→节点2的流量滞后波动)。
二、创新点
1、延迟感知的空间计算方法:通过设计的图学习模块,将邻近节点间的时间延迟相关性与有向图结合,考虑交通流量传播中的延迟特性。
2、延迟感知有向图注意力模块(DDGA):通过空间延迟感知结果精细调整图注意力机制中的节点关系,动态适应交通流量的空间传播。
3、多尺度时空模块:基于延迟感知计算,设计了交替使用时间门控卷积和空间自适应图卷积的模块,增强对时空数据的建模能力。
4、实验验证:在四个真实世界的交通数据集上验证了模型的有效性,结果表明DPSTGC能够高效捕捉时空信息,性能优异。
三、延迟传播时空图卷积网络(DPSTGC)
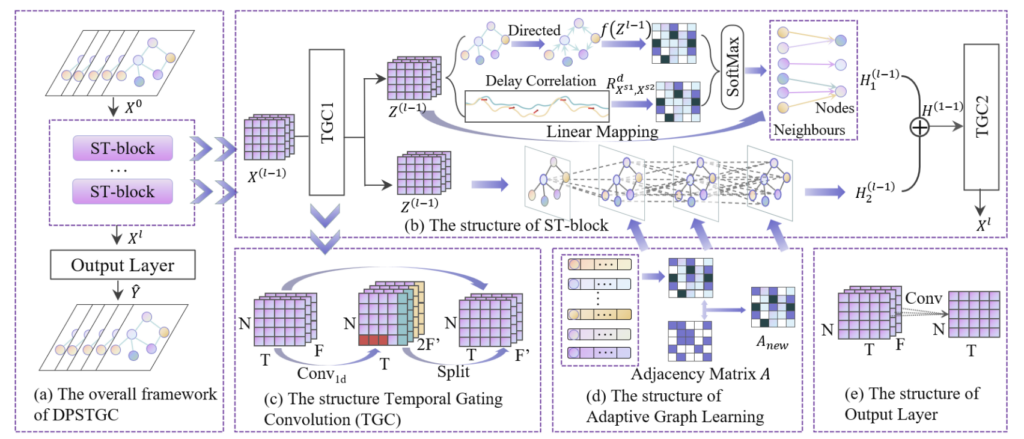
(a)为DPSTGC的总体框架,由多个st块和一个输出层模块组成。
(b)为st块模块的内部细节,包括延迟感知的有向图注意(DDGA)、自适应图卷积网络(AGCN)等;
(c)是时序门控卷积结构(TGC),描述了TGC的运行过程。
(d)表示一种自适应图学习算法,利用节点嵌入学习动态调整图卷积模块内的空间结构。
(e)是输出层模块,它由一个将节点表示映射到输出空间的卷积结构组成。
四、实验设置
数据集名称:PEMS03、PEMS04、PEMS07、PEMS08
数据来源:这些数据集均来自加州交通性能测量系统(Caltrans Performance Measurement System,简称PEMS)。
数据特点:
1)原始数据以30秒为间隔实时收集,并聚合成5分钟间隔,因此每小时有12个数据点。
2)数据集包含不同路段的交通流量信息,反映交通流量在不同时间和地点的变化情况。
3)数据集的空间邻接矩阵是基于实际道路网络构建的,用于表示不同传感器(节点)之间的拓扑关系。
数据预处理:为了确保数据的一致性和可比性,论文中对数据进行了零均值归一化处理。

基准测试范围:论文将其与八种现有的代表性模型进行了对比,DCRNN、STGCN、ASTGCN、GraphWaveNet、STSGCN、STFGNN、AGCRN、SCINet。
性能指标:
1)MAE(Mean Absolute Error)
定义:平均绝对误差,用于衡量预测值与真实值之间的平均偏差。
特点:MAE对所有误差一视同仁,适合衡量整体预测精度。
2)RMSE(Root Mean Squared Error)
定义:均方根误差,用于衡量预测值与真实值之间的误差平方的平方根。
特点:RMSE对较大的误差更为敏感,能够突出模型在极端情况下的表现。
3)MAPE(Mean Absolute Percentage Error)
定义:平均绝对百分比误差,用于衡量预测值与真实值之间的相对误差。
特点:MAPE以百分比形式表示误差,能够更好地反映模型在不同量级数据上的表现。
五、实验结果
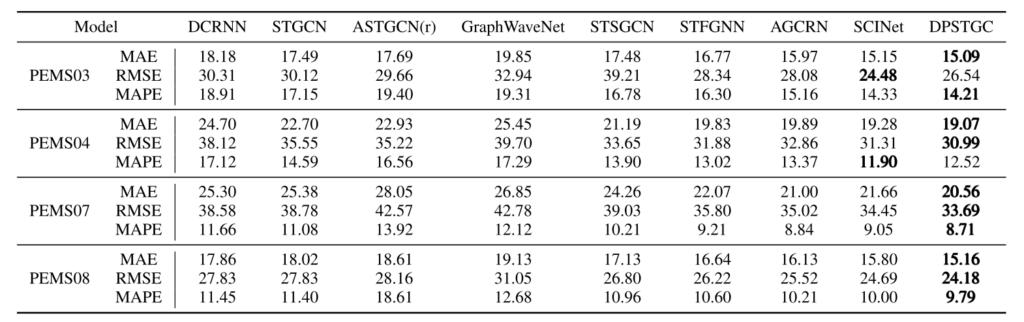
结果表明,DPSTGC在PEMS07和PEMS08数据集上表现出优异的性能,优于所有基线方法。然而,在PEMS03和PEMS04数据集上,DPSTGC在一些指标上不及SCINet。

为了进一步证明DPSTGC的优越性,上面的表格比较了DPSTGC和SCINet在四个数据集上的参数数量。
结果表明,DPSTGC在所有数据集上都比SCINet具有更少的参数,在PEMS07和PEMS08数据集上减少了一个数量级。这表明DPSTGC具有更轻量的参数结构,需要更少的存储和计算资源。
六、总结
性能表现:DPSTGC在PEMS07和PEMS08数据集上表现优于所有基线模型,但在PEMS03和PEMS04数据集上略逊于SCINet。
参数数量:DPSTGC的参数数量显著少于SCINet,尤其是在PEMS07和PEMS08数据集上,参数数量减少了近一个数量级。这表明DPSTGC具有更轻量的参数结构,计算效率更高。
时空建模能力:DPSTGC通过引入延迟传播特性和自适应图卷积网络,能够更有效地捕捉交通流量的时空依赖性,从而提高预测精度。