作者:Ying Ma, Haijie Lou, Ming Yan, Fanghui Sun, Guoqi Li
单位:哈尔滨工业大学
来源:Information Fusion 2024
一、研究背景
不同交通时间序列的特定交通模式:先前的研究中,每个交通时间序列通常被视为一个等权节点,并且参数是全局或局部共享的。然而,这些解决方案忽视了不同交通时间序列之间交通流模式的差异。
交通量序列之间的动态空间相关性:以往的工作仅以静态的方式考虑了交通序列之间的空间相关性,其直接根据预定义的相邻矩阵来建模交通序列之间的空间相关性。这种研究只考虑了交通序列之间的距离和连通性,而忽略了时间、天气和POI等影响因素。
交通量序列的全局时间依赖性:研究交通流量序列的全局时间相关性对于准确的交通流预测具有重要意义。一方面,随着预测周期的延长,不确定性因素严重影响了预测精度。另一方面,交通序列固有的动态变化性进一步增加了交通流预测的不确定性。

二、主要贡献
本文提出了一种新的时空交通预测方法(STFGCN)。该算法主要由时空融合模块和基于Transformer的全局时间相关学习模块组成。时空融合模块由节点特定的图卷积神经网络和连续时态学习模块两部分组成。
1、引入节点特定图卷积运算来学习每个节点的特定交通模式;引入自适应邻接矩阵来学习交通序列之间的动态空间相关性。这两个模块极大地提高了图卷积网络的容量。
2、提出了连续时间相关性学习模块和基于Transformer的全局时间相关性学习模块来增强时间相关性的学习。这两个模块分别用于捕获交通流量序列的连续时间依赖性和全局时间依赖性。
三、模型方法
总体架构
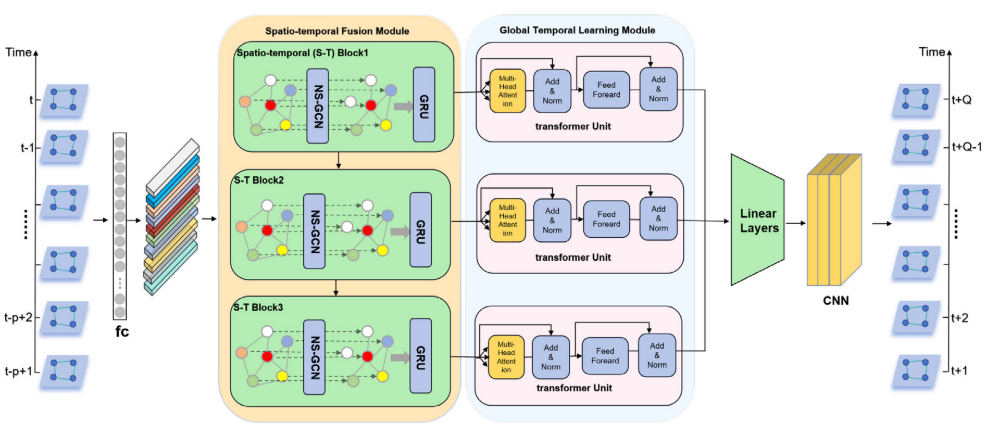
整体结构如图所示。它主要由时空融合模块和全局时间相关学习模块组成。首先,为了初步学习的时间和空间特征,传入的时空数据首先送入时空融合模块。该模型由节点特定的GCN和基于门控递归单元的连续时间相关学习模块组成。然后,介绍了一个基于变换的全局时间相关性学习模块,该模块可以捕获流量序列的全局相关性。最后,提取的时空特征被送入一个完全连接的层,它可以学习非线性的时间和空间特征,并调整输出维度的目标输出。
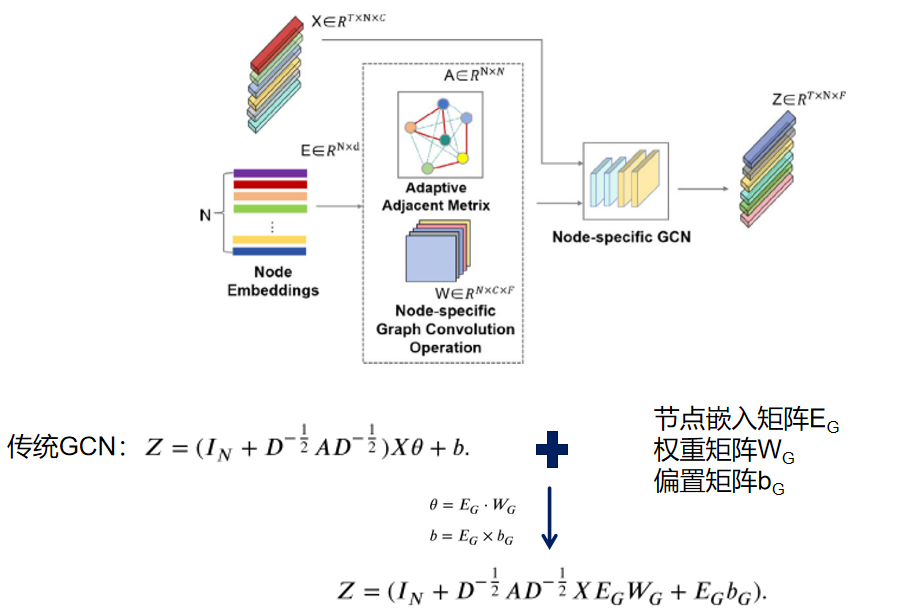
节点特定图神经网络
节点特定图神经网络由节点特定的图卷积运算和自适应邻接矩阵组成。

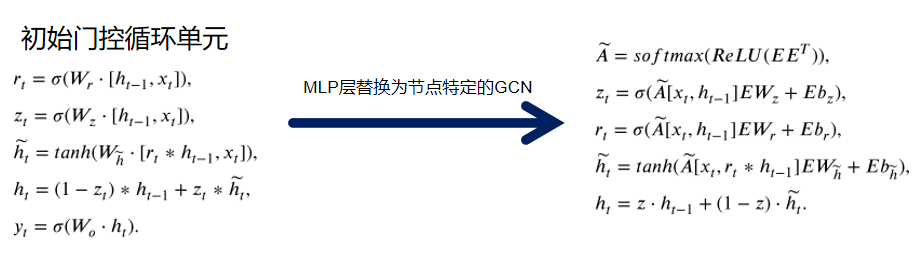
连续时间相关性学习
全局时间相关性学习
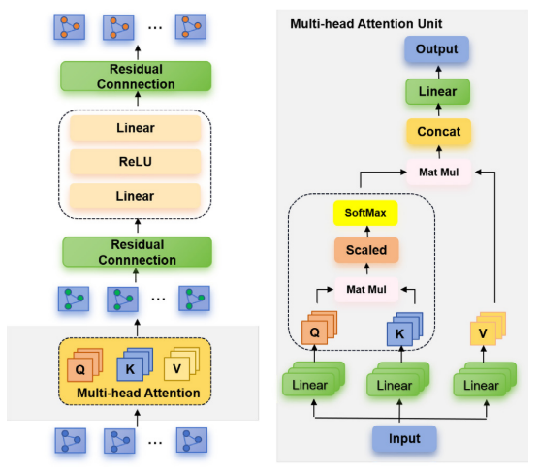
Transformer编码器主使用多个自注意力头并行学习交通序列的多个时序特征,并通过全连接层进一步整合特征。
自注意力机制通过计算查询向量、键向量和值向量之间的点积来学习交通序列不同时间步之间的依赖关系。点积结果经过 Softmax 函数归一化后,用于加权值向量,从而得到每个时间步的最终输出。
四、实验
1、数据集

PeMSD 4:2018年1月至2月旧金山弗朗西斯科湾的交通状况(交通流量、速度、占用)。
PeMSD 8:包含2016年6月至8月圣贝纳迪诺的交通状况(交通流量、速度、占用)。
2、评估指标
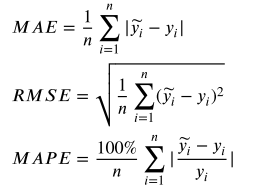
采用了三种主流的评估指标来衡量方法和基线的性能。它们是平均绝对误差(MAE)、均方根误差(RMSE)和平均绝对百分比误差(MAPE)。MAE和RMSE测量绝对偏差值,而MAPE测量偏差值的相对大小。它们的定义如下:
3、性能表现
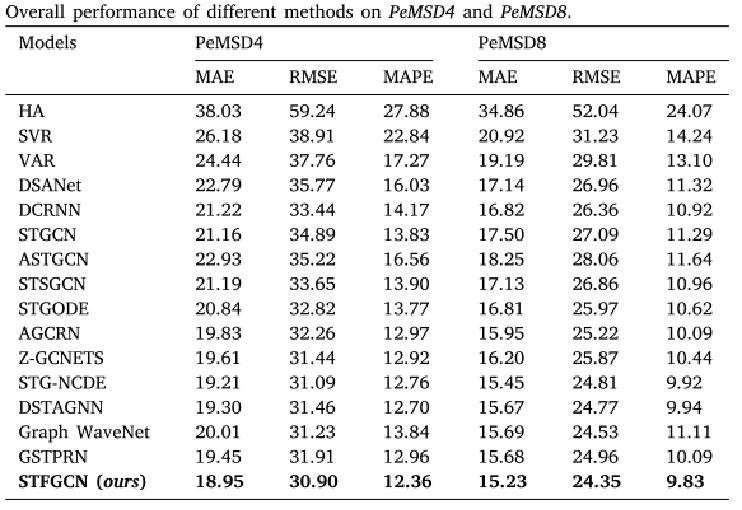
•基于图神经网络的方法优于基于自我注意的方法(例如DSANet),展示了建模空间相关性的重要性和图神经网络在交通流预测中的有效性;
•时间序列方法(例如VAR和SVR)仅考虑时间相关性的预测模型预测效果不佳;
•单纯用递归神经网络学习时间相关性的方法效果不佳;
•本文的方法在两个数据集上表现最好,能够在交通流量预测中同时从空间和时间相关性中学习更多的特征。
4、时间戳预测对比
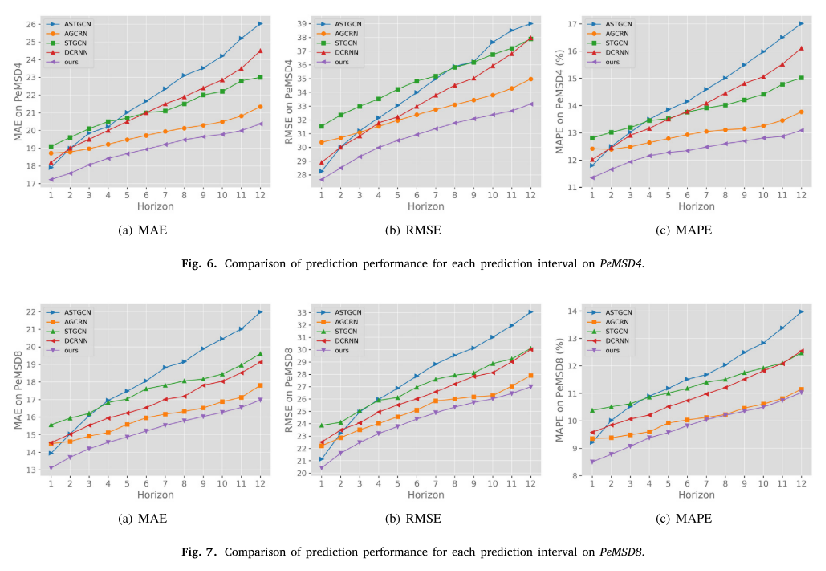
上图分别显示了本文的方法和四种代表性方法在数据集PeMSD 4和PeMSD 8上每个时间戳的性能。ASTGCN在预测的前半部分(提前一个或两个时间步)表现良好。然而,随着预测时间的增加,其性能会迅速下降。AGCRN的性能随着预测时域的增加而缓慢下降。同时,它在整个预测时间范围内的性能都很好,但仍比STFGCN差。总体而言,该方法在交通流预测方面优于其他方法。
5、消融实验
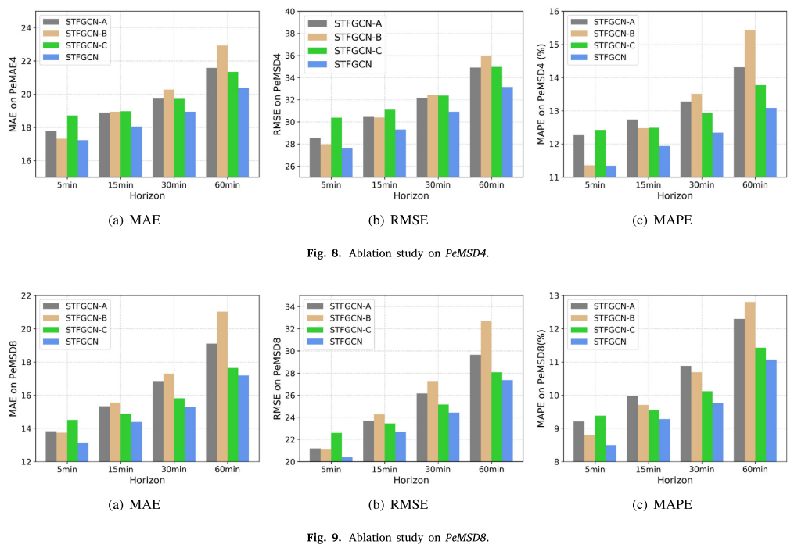
(1)如果没有自适应邻接矩阵(即STFGCN-A),采用预定义邻接矩阵后,性能大幅下降,说明自适应邻接矩阵能更准确地学习节点间的空间相关性,而预定义邻接矩阵不能包含空间相关性的完整信息。
(2)当我们使用原始图卷积操作而不是特定于节点的图卷积操作(即STFGCN-B),证明了图卷积运算在学习每个节点的特定流量模式中的有效性。
(3)如果没有全局时间相关性学习模块(即STFGCN-C),性能下降,说明仅通过门控递归单元学习时间相关性是不够的,证明了全局时间相关性学习模块在学习时间相关性方面的有效性。
6、超参数研究
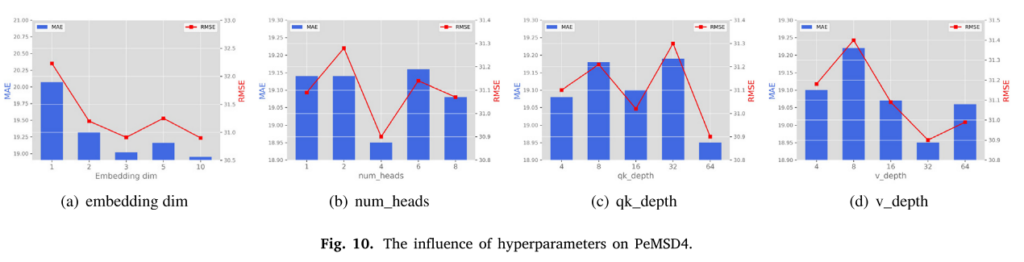
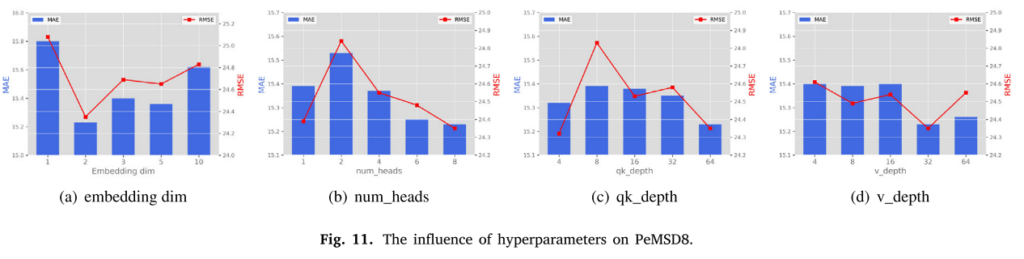
当在数据集PeMSD 4和PeMSD 8上分别设置embedding dim为10和2时表现最佳。然后,num_heads的值在数据集PeMSD 4和PeMSD 8上分别设置为4和8时最佳。至于qk_depth和v_depth的值,当它们分别在PeMSD 4和PeMSD 8中被设置为64和32时,它们是最佳的。
五、总结
•相较于传统的图卷积神经网络,STFGCN使用了节点特定的图卷积神经网络,为每个节点分配一个可学习的权重矩阵,使其能够从候选模式中提取自身参数,并学习特定模式。这使得模型能够学习不同交通序列的具体交通模式。
•STFGCN 通过学习每个节点的嵌入矩阵,并计算嵌入矩阵之间的相似度,来构建自适应邻接矩阵。这使得模型能够动态地捕捉节点之间的空间依赖性,更准确地表示节点之间的连接关系,克服了预定义邻接矩阵的局限性。
•STFGCN 引入基于门控循环单元 (GRU) 的模块,学习交通序列的连续时间相关性。这能够捕捉交通序列在短时间内变化的规律和有效地处理短期内的噪声和随机性。
•STFGCN 引入基于 Transformer 的模块,学习交通序列的全局时间相关性。从而能够捕捉交通序列在长时间范围内变化的规律,并且通过自注意力机制,捕捉交通序列中不同时间步之间的复杂依赖关系。
STFGCN的上述模型实现方法克服了传统方法的局限性,强调了节点特异性学习和全局时间相关性学习的重要性。此外,交通流量会受到多种外部因素(例如天气、事件和 POI 等)的影响,在未来的研究中,可以考虑将外部因素纳入模型,以进一步提高预测的准确性。